Scientists at Hong Kong University of Science and Technology make artificial eye far better than anything current.

Scientists at Hong Kong University of Science and Technology make artificial eye far better than anything current.
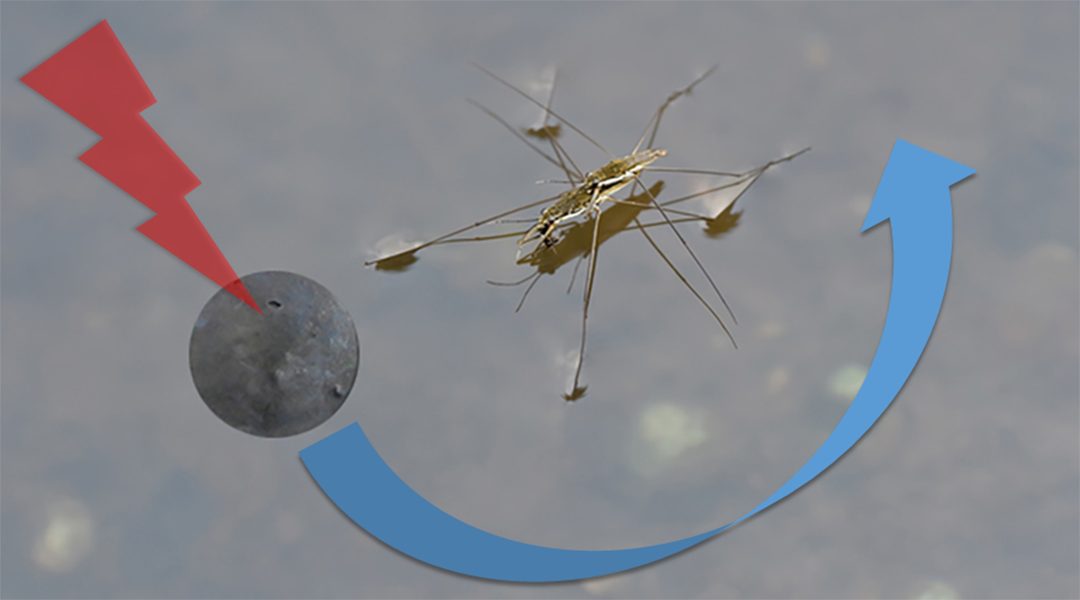
Millimeter-scale robots were shown to mimic the movement and behavior of living insects for advanced materials science, biological, and biomedical applications.

From cracking eggs to plating the finished dish, a team of engineers have trained a robot to prepare omelettes that actually taste good.

An automatic design approach with a new 3D-printing method is established to fabricate soft composites that can change to predetermined shapes and generate controllable robotic motions under a magnetic field.
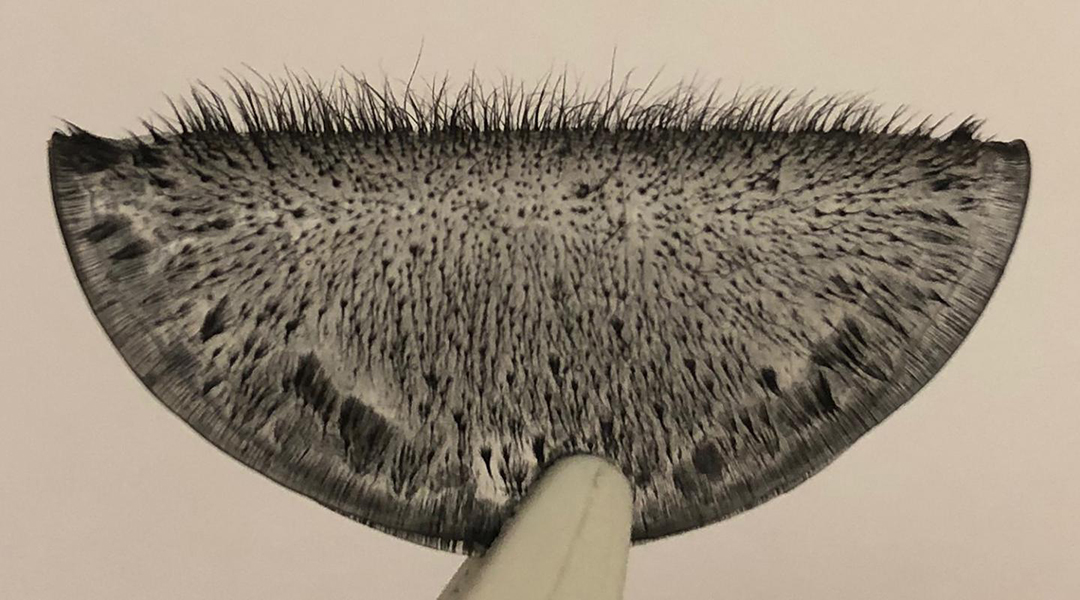
Researchers create an artificial array of magnetic cilia that could contribute to advancing the capabilities of soft robotics.
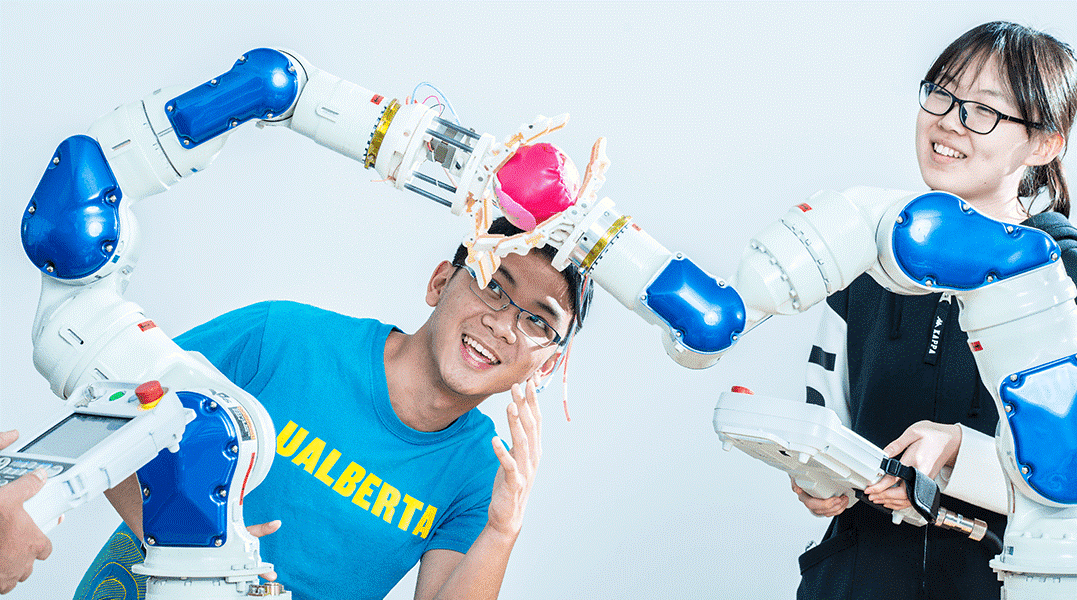
Robotic systems have the potential to aid and complement healthcare in an effort to spark novel interdisciplinary initiatives between medical, engineering, and science communities.
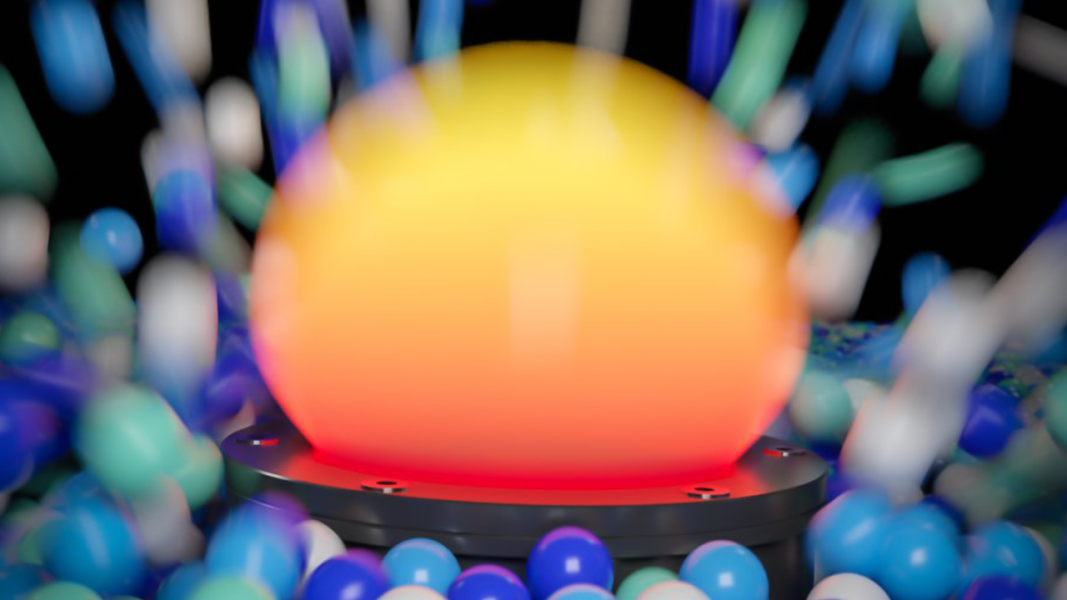
A soft robotic actuator harnesses the elastic snap‐through and snap‐back instability of a rubber balloon to realize rapid, large deformations.
Kirigami transformations give rise to mechanical actuation of a soft robot upon light illumination.

Researchers from Taiwan and Japan have developed a low-cost, intelligent soft robotic finger using paper electronics.
Using a micro-3D-printing technique, researchers were able to print detailed robotic parts that are smaller than the diameter of a human hair and display color-expressing features for microrobot tracking and identification.
 New theory suggests gravity is not a fundamental force
New theory suggests gravity is not a fundamental force
 Higgs boson may be driving the Universe’s expansion
Higgs boson may be driving the Universe’s expansion
 Water-powered gadgets may be on the horizon thanks to new evaporation-based energy device
Water-powered gadgets may be on the horizon thanks to new evaporation-based energy device
 Scientists discover a new class of antibiotics
Scientists discover a new class of antibiotics
 Micron-sized hidden dimensions could solve two of physics’ deepest puzzles
Micron-sized hidden dimensions could solve two of physics’ deepest puzzles
 Turning Periods into Power: Menstrual Blood a Valuable Resource for Medical Diagnostics
Turning Periods into Power: Menstrual Blood a Valuable Resource for Medical Diagnostics