Soft robots with compliant bodies and the ability to adapt their size are attractive for a wide range of applications, including miniatured medical devices, smart wearables, the exploration of unstructured or human-inaccessible environments, and biomimetic locomotion. Yet their responses are typically slow, and their pliable, dynamic forms difficult to control.
To address these challenges, researchers from the University of Pennsylvania and the University of California, Berkeley have developed a new type of metacap; a key piece of robotics hardware. These new metacaps have snapping responses that can be sped up and controlled with the introduction of a carefully calculated array of ribs.
When a metacap “snaps”, it pops open and closed, pushing air back and forth. This snapping allows a soft robot to propel and grip without any electronics. The new ribbed metacaps permit unprecedented levels of control and speed, enabling robots delicate enough to gently grasp a ripe strawberry and powerful enough to swim through choppy, dangerous waters.
“The boundary between materials and architected structures has become more and more ambiguous,” said Shu Yang, Joseph Bordogna Professor in the Department of Materials Science and Engineering at the University of Pennsylvania. “As material scientists and engineers, we embrace challenges to realize new functionalities that have not been achieved before, not only by engineering their molecular structures but also by the design of architected structures at micro- and macroscales. This metacap is a perfect example.”
The new research published in Advanced Intelligent Systems brings the concept of architected structures into spherical caps, introducing a new class of metamaterials with programmable response for a wide range of robotic applications.
Spherical shells that can be quickly tuned “inside-out” upon mechanical loading — what engineers refer to as “snap-through” technologies — have been one of the most widely employed mechanisms for achieving rapid responses in robots. However, they are also extremely sensitive to flaws and suffer from limited energy release.
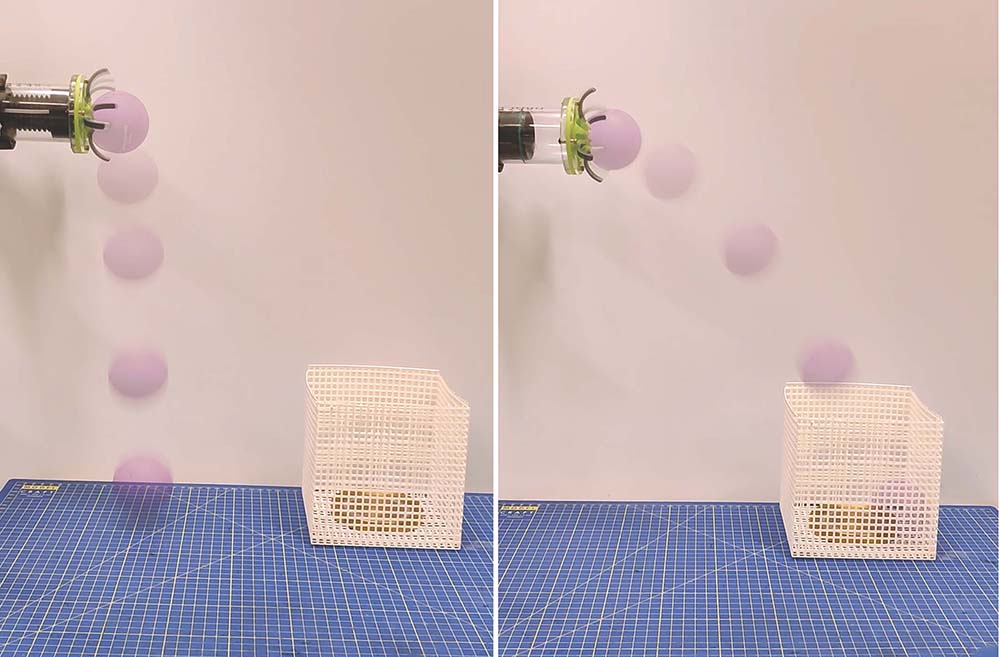
The novel design of the ribbed metacap overcomes these limitations. In particular, the metacap enables ultra-fast and sensorless grippers that can grasp objects in milliseconds upon physical contact. Its quickest actuation speed is 3.75 miliseconds for gripping — the fastest grasping time for soft grippers reported in scientific literature.
This especially notable for the relatively large size of the centimeter-scale device, as the majority of soft grippers are demonstrated at millimeter scales.
These grippers can be incorporated into robotic platforms and sports equipment for practical applications. For example, the metacap gripper can be integrated inside a baseball glove, allowing a player to catch a ball without the use of her fingers. This feature not only has to potential help players practice hand movements necessary to improve their skill at the sport but also empower people with hand disabilities to participate.
Additionally, the metacaps can be used to propel a swimming robot with amplified and tunable speeds as well as enabling untethered, electronics-free swimming. These swimming robots are perfect for deploying in extreme environments where electronics would be vulnerable to damage or at risk for spark ignition.
“This design has the potential to revolutionize the field of soft robotics, maintaining the compliance of versatility, while offering substantial benefits of safety, adaptability, and tunability,” said Lishuai Jin, a former postdoctoral fellow in the Yang lab at the University of Pennsylvania School of Engineering and Applied Science. “The metcap concept can be utilized for medical treatments, search and rescue missions, and even in industrial settings.”
Reference: Shu Yang, et al., Ultrafast, Programmable, and Electronics-Free Soft Robots Enabled by Snapping Metacap, Advanced Intelligent Systems (2023). DOI: 10.1002/aisy.202300039