Researchers have made a prototype of a soft robot that can carry drugs into the intestines. Responsive to both temperature changes and magnetism, the soft carrier can deposit drugs at a specific site within the labyrinthine organ. The device may be especially useful in treating bleeding deep within the small and large intestines.
When bleeding occurs in these locations, surgeons use endoscopy, wherein an anchored, bendy tube is inserted into the gut to seek out bleeding and staunch its flow. Surgery and drugs may also be used for treating gastrointestinal (GI) bleeds. However, softer, more flexible, and untethered devices may be a more effective alternative when attempting to gain access to the gut’s twisty sections.
“Untethered devices, such as soft robotic carriers, offer several benefits in treating the lower GI tract,” said Christoff Heunis, a researcher at the University of Twente, in the Netherlands, and first author on the study published in Macromolecular Bioscience. “They can be more flexible and maneuverable than traditional tools, allowing them to reach areas that are harder to access. They can also be designed to be minimally invasive, which can reduce the risk of complications for the patient.”
A shape-shifting robot to access hard-to-reach places
Heunis and colleagues developed a novel magnetically responsive carrier to help deliver drugs to particularly inaccessible parts of the gut. Inspired by the shape and movement of a starfish, the researchers designed a multi-layered soft robot with the ability to respond to temperature and applied magnetic fields. They used a shape memory polymer whose shape distorts and can regain its original shape in the presence of an appropriate stimulus.
“We used a shape memory polymer to create the carrier, and embedded magnetic elements that respond to an external field to control the release of the drug,” said Heunis. The robot also deforms in response to the body temperature, eliminating the need for an external heat supply that might be harmful to tissue.
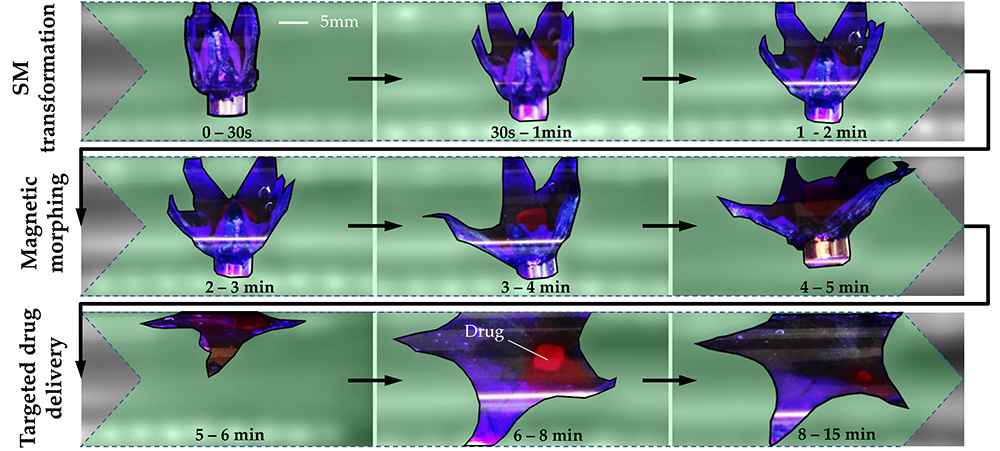
Next, they tested the starfish-shaped soft carrier in two settings: ex vivo and inside a phantom, an artificial model of a large intestine. On heating to 50℃, the soft carrier transformed its shape, drawing in its starfish-like arms, closing up around a drug. When it was exposed to body heat and magnetism, the shape of the carrier deformed and released the drug.
Tests in a GI model
For the phantom experiment, the researchers created a setup that replicated a human large intestine in both shape and temperature. When they introduced the drug-carrying soft robot into this model intestine, it successfully reached its target and released its cargo of biodegradable drugs.
When initially inserted into the GI model, the carrier is at room temperature between 20℃ and 25℃. As it moves through the tract, the robot warms to 37℃, transforming from a hard and brittle state to one that is soft and pliable.
The researchers oriented the soft robot to the target location using an external magnet where the magnetic field furthered the reshaping of the carrier which they coined “magnetic morphing”. Once at the target site, the carrier’s softened state promotes the opening of its arms, freeing the drug.
“To determine when the gripper reaches the target location where the transition temperature is reached, we need to consider several parameters, such as the thickness of the gripper, the rate of temperature change, and the material properties,” explained Heunis. Moreover, after delivery the robot can be easily retrieved with the external magnet.
“We validated our design through simulation and experiments in a phantom of a large intestine and found that the carrier was effective at delivering the drug to the target location—specifically, that we could predict at which point in time the drugs were released at body temperature,” said Heunis. “This means that certain quantities of specific drugs can be controlled and released at a point of interest without the need to constantly monitor that drug, making it much more efficient than current endoscopic techniques.”
The small size of the robot makes it easily ingestible as well as suitable for anal administration. “The advantages of this design over earlier iterations include greater flexibility, better control over the release of the drug, and the ability to reach more challenging target locations,” said Heunis. But in order to make this prototype clinically functional, more research is needed, especially in a real-world setting.
Reference: Christoff M. Heunis, et al., A Magnetic Bio-Inspired Soft Carrier as a Temperature-Controlled Gastrointestinal Drug Delivery System, Macromolecular Bioscience (2023). DOI: 10.1002/mabi.202200559