Using off-the-shelf components and simple fibre-based construction, a new smart glove captures the complex sensing and high-order reasoning of the human hand.

Using off-the-shelf components and simple fibre-based construction, a new smart glove captures the complex sensing and high-order reasoning of the human hand.
A transparent and stretchable touch sensor could enable robust touch input mapping under either static or dynamic deformation.

An automatic design approach with a new 3D-printing method is established to fabricate soft composites that can change to predetermined shapes and generate controllable robotic motions under a magnetic field.
Using an asymmetric sawtooth-shaped potential, researchers achieve transport of tiny molecules driven by particle crowding.

Using magnetic connectors, researchers create “plug-and-play” mobile health monitoring devices that can be catered to an individual’s need.
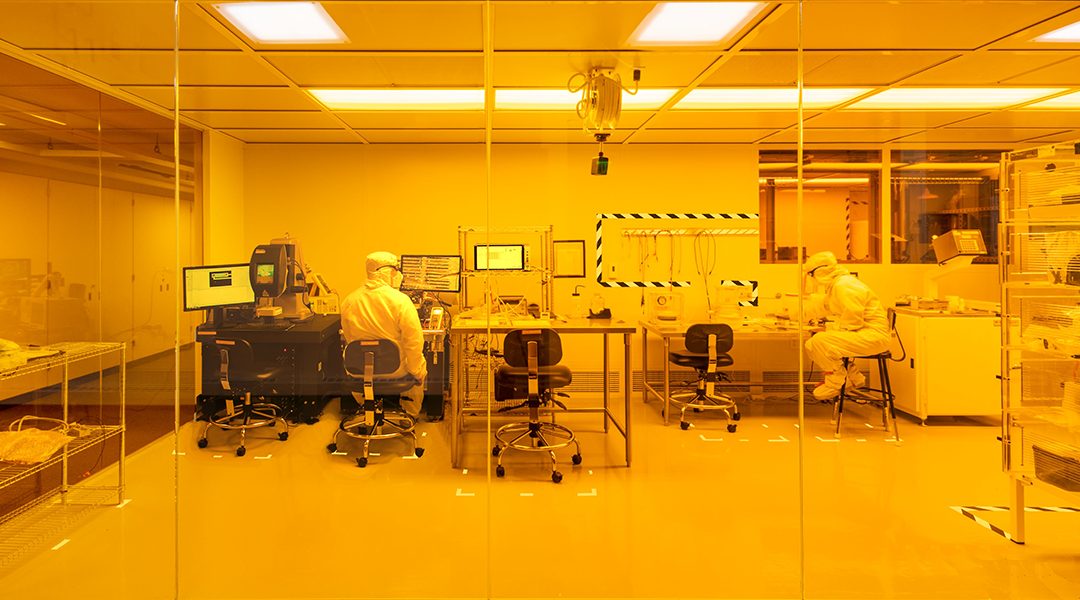
MIT lab offers a model for cost savings, productivity, and safety; principles may also facilitate efficient reopening in the future.
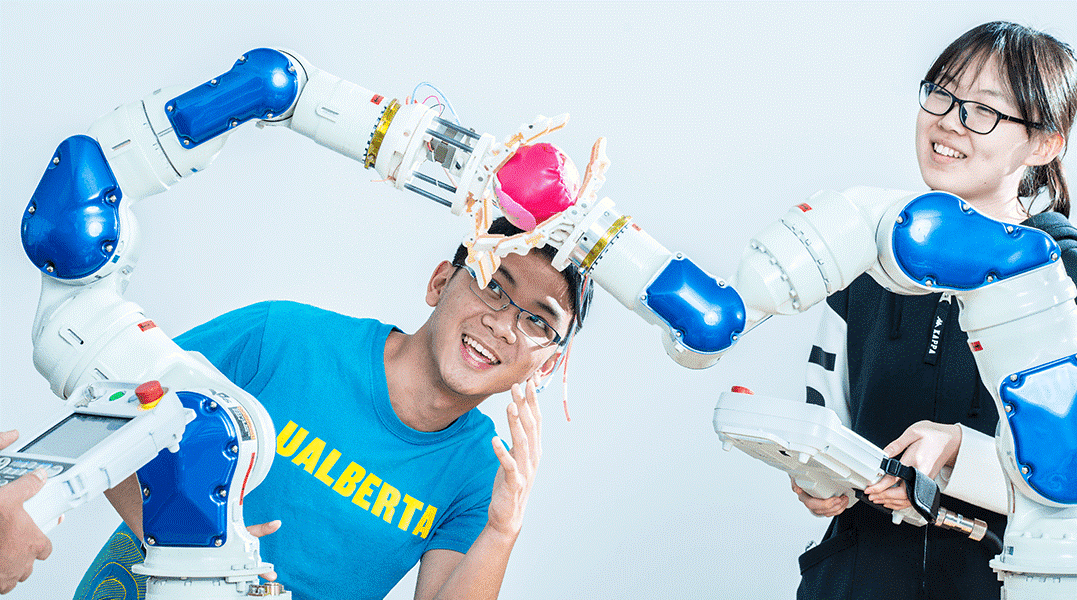
Robotic systems have the potential to aid and complement healthcare in an effort to spark novel interdisciplinary initiatives between medical, engineering, and science communities.

Researchers from Taiwan and Japan have developed a low-cost, intelligent soft robotic finger using paper electronics.
Using a micro-3D-printing technique, researchers were able to print detailed robotic parts that are smaller than the diameter of a human hair and display color-expressing features for microrobot tracking and identification.
Controlling the probability of a series of seemingly random events is the key to mimicking the human brain to optimize neuromorphic learning.
 New theory suggests gravity is not a fundamental force
New theory suggests gravity is not a fundamental force
 Quantum entanglement visualized for the first time ever
Quantum entanglement visualized for the first time ever
 Scientists take a closer look at rare particles called hypernuclei
Scientists take a closer look at rare particles called hypernuclei
 French WEST reactor breaks record in nuclear fusion
French WEST reactor breaks record in nuclear fusion
 Higgs boson may be driving the Universe’s expansion
Higgs boson may be driving the Universe’s expansion
 Researchers take a glimpse at the structure of rare tetraquarks
Researchers take a glimpse at the structure of rare tetraquarks
 Black hole images deliver a deathblow to alternative theory of gravity
Black hole images deliver a deathblow to alternative theory of gravity
 CERN scientists search for new physics in unusual energy patterns linked to hidden particles
CERN scientists search for new physics in unusual energy patterns linked to hidden particles
 An anti-inflammatory peptide may hold the key to low-back pain relief
An anti-inflammatory peptide may hold the key to low-back pain relief
 Could a nuclear explosion set Earth’s atmosphere on fire?
Could a nuclear explosion set Earth’s atmosphere on fire?